Introduction to ACRN Configuration¶
ACRN configuration is designed for System Integrators and Tier 1s to customize ACRN to meet their own needs. It allows users to adapt ACRN to target boards as well as configure hypervisor capabilities and provision VMs.
ACRN configuration consists of the following key components.
Configuration data saved as XML files.
A configuration toolset to generate and edit configuration data.
The following sections introduce the concepts and tools of ACRN configuration from the aspects below.
Types of Configurations introduces the objectives and main contents of different types of configuration data.
Using ACRN Configuration Toolset overviews the steps to customize ACRN configuration using the configuration toolset.
Types of Configurations¶
ACRN includes two types of configurations: board and scenario. The configuration data are saved in XML files. The following sections briefly describe the objectives and main contents of each file.
Board Configuration File¶
The board configuration file stores hardware-specific information extracted from the target platform. Examples of information:
Capacity of hardware resources (such as processors and memory)
Platform power states
Available devices
BIOS versions
You need a board configuration file to create scenario configurations. The board configuration is scenario-neutral by nature. Thus, multiple scenario configurations can be based on the same board configuration.
You also need a board configuration file to build an ACRN hypervisor. The build process uses the file to build a hypervisor that can initialize and manage the platform at runtime.
Scenario Configuration File¶
The scenario configuration file defines a working scenario by configuring hypervisor capabilities and defining VM attributes and resources. Examples of parameters:
Hypervisor capabilities
Availability and settings of hypervisor features, such as debugging facilities, scheduling algorithm, inter-VM shared memory (ivshmem), and security features.
Hardware management capacity of the hypervisor, such as maximum PCI devices and maximum interrupt lines supported.
Memory consumption of the hypervisor, such as the entry point and stack size.
VM attributes and resources
VM attributes, such as VM names.
Maximum number of VMs supported.
Resources allocated to each VM, such as number of vCPUs, amount of guest memory, and pass-through devices.
User VM settings, such as boot protocol and VM OS kernel parameters.
Settings of virtual devices, such as virtual UARTs.
You need a scenario configuration file to build an ACRN hypervisor. The build process uses the file to build a hypervisor that can initialize its capabilities and set up the VMs at runtime.
For pre-launched User VMs, all attributes and resources are static configurations. The VM attributes and resources are exactly the amount of resources allocated to them.
For post-launched User VMs, some resources are static configurations. Other resources are under the control of the Service VM and can be dynamically allocated to a VM via a launch script.
Using ACRN Configuration Toolset¶
The ACRN configuration toolset lets you create and edit configuration data. The toolset includes:
Board Inspector: Collects information from your target machine and generates a board configuration file.
ACRN Configurator: Provides a graphical user interface (GUI) for configuring your hypervisor and VM parameters, and generates a scenario configuration file and launch scripts.
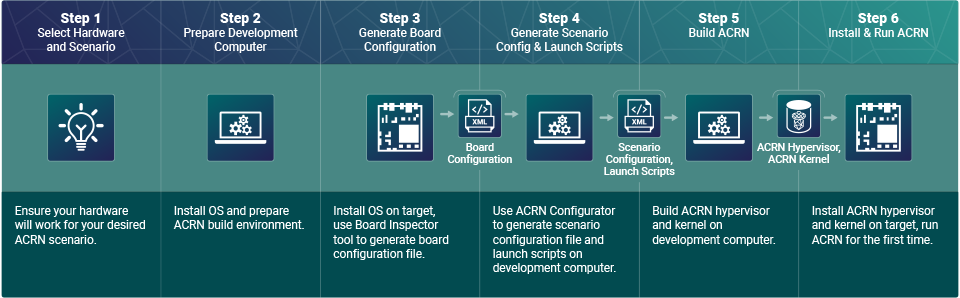
As introduced in Configuration and Development Overview, configuration takes place at Step 3: Generate a Board Configuration File and Step 4: Generate a Scenario Configuration File and Launch Scripts in the overall development process:
ACRN source also includes makefile targets to aid customization. See Hypervisor Makefile Options.