Software Design Guidelines¶
Error Detection and Error Handling¶
Workflow¶
Error detection and error handling workflow in the ACRN hypervisor is shown in Figure 230.
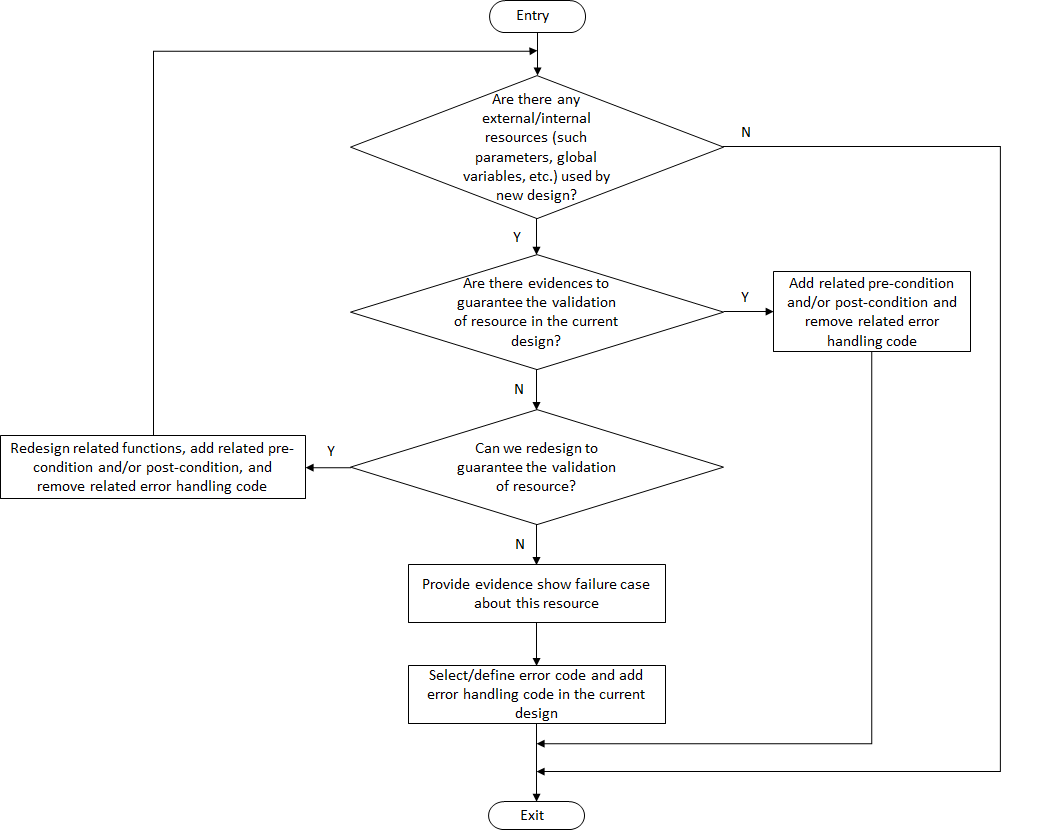
Figure 230 Error Detection and Error Handling Workflow¶
Design Assumption¶
There are three types of design assumptions in the ACRN hypervisor, as shown below:
- Pre-condition
Pre-conditions shall be defined right before the definition/declaration of the corresponding function in the C source file or header file. All pre-conditions shall be guaranteed by the caller of the function. Error checking of the pre-conditions is not needed in release version of the function. Developers could use ASSERT to catch design errors in a debug version for some cases. Verification of the hypervisor shall check whether each caller guarantees all pre-conditions of the callee (or not).
This design assumption applies to the following cases:
Input parameters of the function.
Global state, such as hypervisor operation mode.
- Post-condition
Post-conditions shall be defined right before the definition/declaration of the corresponding function in the C source file or header file. All post-conditions shall be guaranteed by the function. All callers of the function should trust these post-conditions are met. Error checking of the post-conditions is not needed in release version of each caller. Developers could use ASSERT to catch design errors in a debug version for some cases. Verification of the hypervisor shall check whether the function guarantees all post-conditions (or not).
This design assumption applies to the following case:
Return value of the function
It is used to guarantee that the return value is valid; for example, the return pointer is not NULL, the return value is within a valid range, or the members of the return structure are valid.
- Application Constraints
Application constraints of the hypervisor shall be defined in design document and safety manual. All application constraints shall be guaranteed by external safety applications, such as Board Support Package, firmware, safety VM, and Hardware. The verification of application integration shall check whether the safety application meets all application constraints. These constraints must be verified during hypervisor validation test. It is optional to do error checking for application constraints at hypervisor boot time.
This design assumption applies to the following cases:
Configuration data defined by external safety application, such as physical PCI device information specific for each board design.
Input data that is specified only by external safety application.
Note
If input data can be specified by both a non-safety VM and a safety VM, the application constraint isn’t applicable to these data. Related error checking and handling shall be done during hypervisor design.
Refer to the C Programming Language Coding Guidelines to document these design assumptions with doxygen-style comments.
Architecture Level¶
Functional Safety Consideration¶
The hypervisor will do range check in hypercalls and HW capability checks according to Table A.2 of FuSA Standards [IEC_61508-3_2010].
Error Handling Methods¶
The error handling methods used in the ACRN hypervisor on an architecture level are shown below.
- Invoke default fatal error handler
The hypervisor shall invoke the default fatal error handler when the below cases occur. Customers can define platform-specific handlers, allowing them to implement additional error reporting (mostly to hardware) if required. The default fatal error handler will invoke platform-specific handlers defined by users at first, then it will panic the system.
This method applies to the following cases:
Related hardware resources are unavailable.
Boot information is invalid during platform initialization.
Unexpected exception occurs in root mode due to hardware failures.
Failures occur in the VM dedicated for error handling.
- Return error code
The hypervisor shall return an error code to the VM when the below cases occur. The error code shall indicate the error type detected (e.g., invalid parameter, device not found, device busy, and resource unavailable).
This method applies to the following case:
The hypercall parameter from the VM is invalid.
- Inform the safety VM through specific register or memory area
The hypervisor shall inform the safety VM through a specific register or memory area when the below cases occur. The VM will decide how to handle the related error. This shall be done only after the VM (Safety VM or Service VM) dedicated to error handling has started.
This method applies to the following cases:
Machine check errors occur due to hardware failures.
Unexpected VM entry failures occur, where the VM is not the one dedicated for error handling.
- Panic the system via ASSERT
The hypervisor can panic the system when the below cases occur. It shall only be used for debug and used to check pre-conditions and post-conditions to catch design errors.
This method applies to the following case:
Software design errors occur.
Rules of Error Detection and Error Handling¶
The rules of error detection and error handling on an architecture level are shown in Table 6 below.
Resource Class |
Failure Mode |
Error Detection via Hypervisor |
Error Handling Policy |
Example |
|---|---|---|---|---|
External resource provided by VM |
Invalid register/memory state on VM exit |
Yes |
Follow SDM strictly, or state any deviation to the document explicitly. |
Unsupported MSR or invalid CPU ID |
Invalid hypercall parameter |
Yes |
The hypervisor shall return related error code to the VM |
Invalid hypercall parameter provided by any VM |
|
Invalid data in the sharing memory area |
Yes |
Case by case depending on the data |
Invalid data in memory shared with all VMs, such as IO request buffers and sbuf for debug |
|
External resource provided by bootloader (GRUB or SBL) |
Invalid E820 table or invalid boot information |
Yes |
The hypervisor shall panic during platform initialization. |
Invalid E820 table or invalid boot information |
Physical resource used by the hypervisor |
1GB page is not available on the platform or invalid physical CPU ID |
Yes |
The hypervisor shall panic during platform initialization. |
1GB page is not available on the platform or invalid physical CPU ID |
Examples¶
Here is an example to illustrate when error handling codes are required on an architecture level.
There are two pre-condition statements of vcpu_from_vid. It indicates that
it’s the caller’s responsibility to guarantee these pre-conditions.
/**
* @pre vcpu_id < CONFIG_MAX_VCPUS_PER_VM
* @pre &(vm->hw.vcpu_array[vcpu_id])->state != VCPU_OFFLINE
*/
static inline struct acrn_vcpu *vcpu_from_vid(struct acrn_vm *vm, uint16_t vcpu_id)
{
return &(vm->hw.vcpu_array[vcpu_id]);
}
vcpu_from_vid is called by hcall_set_vcpu_regs, which is a hypercall.
hcall_set_vcpu_regs is an external interface and vcpu_id is provided
by the VM. In this case, we shall add the error checking codes before calling
vcpu_from_vid to make sure that the passed parameters are valid and the
pre-conditions are guaranteed.
Here is the sample code for error checking before calling vcpu_from_vid:
status = 0;
if (vcpu_id >= CONFIG_MAX_VCPUS_PER_VM) {
pr_err("vcpu id is out of range \r\n");
status = -EINVAL;
} else if ((&(vm->hw.vcpu_array[vcpu_id]))->state == VCPU_OFFLINE) {
pr_err("vcpu is offline \r\n");
status = -EINVAL;
}
if (status == 0) {
vcpu = vcpu_from_vid(vm, vcpu_id);
...
}
Module Level¶
Functional Safety Consideration¶
Data verification, and explicit specification of pre-conditions and post-conditions are applied for internal functions of the hypervisor according to Table A.4 of FuSA Standards [IEC_61508-3_2010] .
Error Handling Methods¶
The error handling methods used in the ACRN hypervisor on a module level are shown below.
- Panic the system via ASSERT
The hypervisor can panic the system when the below cases occur. It shall only be used for debugging, used to check pre-conditions and post-conditions to catch design errors.
This method applies to the following case:
Software design errors occur.
Rules of Error Detection and Error Handling¶
The rules of error detection and error handling on a module level are shown in Table 7 below.
Resource Class |
Failure Mode |
Error Detection via Hypervisor |
Error Handling Policy |
Example |
|---|---|---|---|---|
Internal data of the hypervisor |
N/A |
Partial. The related pre-conditions are required. The design will guarantee the correctness and the test cases will verify the related pre-conditions. If the design cannot guarantee the correctness, the related error handling codes need to be added. Note: Some examples of pre-conditions are listed, like non-empty array, valid array size and non-null pointer. |
The hypervisor shall use the internal resource/data directly. |
Virtual PCI device
information, defined
with array
|
Configuration data of the VM |
Corrupted VM config |
No. The related pre-conditions are required. Note: VM configuration data are auto generated based on different board configs, they are defined as static structure. |
The bootloader initializes hypervisor (including code, data, and bss) and verifies the integrity of hypervisor image in which VM configurations are. Thus hypervisor does not need any additional mechanism. |
|
Configuration data of the hypervisor |
N/A |
No. The related pre-conditions are required. The design will guarantee the correctness and this shall be verified manually. |
The hypervisor shall use the internal resource/data directly. |
The maximum number of PCI devices in the VM, defined with CONFIG_MAX_PCI_DEV_NUM through configuration. |
Examples¶
Here are some examples to illustrate when error handling codes are required on a module level.
Example_1: Analyze the function ``partition_mode_vpci_init``
/**
* @pre vm != NULL
* @pre vm->vpci->pci_vdev_cnt <= CONFIG_MAX_PCI_DEV_NUM
*/
static int32_t partition_mode_vpci_init(const struct acrn_vm *vm)
{
struct acrn_vpci *vpci = (struct acrn_vpci *)&(vm->vpci);
struct pci_vdev *vdev;
struct acrn_vm_config *vm_config = get_vm_config(vm->vm_id);
struct acrn_vm_pci_dev_config *pci_dev_config;
uint32_t i;
vpci->pci_vdev_cnt = vm_config->pci_dev_num;
for (i = 0U; i < vpci->pci_vdev_cnt; i++) {
vdev = &vpci->pci_vdevs[i];
vdev->vpci = vpci;
pci_dev_config = &vm_config->pci_devs[i];
vdev->vbdf.value = pci_dev_config->vbdf.value;
if (vdev->vbdf.value != 0U) {
partition_mode_pdev_init(vdev, pci_dev_config->pbdf);
vdev->ops = &pci_ops_vdev_pt;
} else {
vdev->ops = &pci_ops_vdev_hostbridge;
}
if (vdev->ops->init != NULL) {
if (vdev->ops->init(vdev) != 0) {
pr_err("%s() failed at PCI device (vbdf %x)!",
__func__, vdev->vbdf);
}
}
}
return 0;
}
get_vm_config is called by partition_mode_vpci_init.
There are one pre-condition and two post-conditions of get_vm_config.
It indicates that the caller of get_vm_config shall guarantee these
pre-conditions and get_vm_config itself shall guarantee the post-condition.
/**
* @pre vm_id < CONFIG_MAX_VM_NUM
* @post retval != NULL
* @post retval->pci_dev_num <= MAX_PCI_DEV_NUM
*/
struct acrn_vm_config *get_vm_config(uint16_t vm_id)
{
return &vm_configs[vm_id];
}
Question_1: Is error checking required for ``vm_config``?
No. Because vm_config is getting data from get_vm_config and the
post-condition of get_vm_config guarantees that the return value is not NULL.
Question_2: Is error checking required for ``vdev``?
No. Here are the reasons:
The pre-condition of
partition_mode_vpci_initguarantees thatvmis not NULL. It indicates thatvpciis not NULL. Sincevdevis getting data from the arraypci_vdevs[]via indexing,vdevis not NULL as long as the index is valid.The post-condition of
get_vm_configguarantees thatvpci->pci_vdev_cntis less than or equal toCONFIG_MAX_PCI_DEV_NUM, which is the array size ofpci_vdevs[]. It indicates that the index used to getvdevis always valid.
Given the two reasons above, vdev is always not NULL. So, the error
checking codes are not required for vdev.
Question_3: Is error checking required for ``pci_dev_config``?
No. pci_dev_config is getting data from the array pci_vdevs[], which
is the physical PCI device information coming from Board Support Package and
firmware. For physical PCI device information, the related application
constraints shall be defined in the design document or safety manual. For
debug purposes, developers could use ASSERT here to catch the Board Support
Package or firmware failures, which do not guarantee these application
constraints.
Question_4: Is error checking required for ``vdev->ops->init``?
No. Here are the reasons:
Question_2 proves that
vdevis always not NULL.vdev->opsis fully initialized beforevdev->ops->initis called.
Given the two reasons above, vdev->ops->init is always not NULL. So, the
error checking codes are not required for vdev->ops->init.
Question_5: How to handle the case when ``vdev->ops->init(vdev)`` returns non-zero?
This case indicates that the initialization of specific virtual device fails. Investigation has to be done to figure out the root-cause. Default fatal error handler shall be invoked here if it is caused by a hardware failure or invalid boot information.
Example_2: Analyze the function ``partition_mode_vpci_deinit``
/**
* @pre vdev != NULL
* @pre vm->vpci->pci_vdev_cnt <= CONFIG_MAX_PCI_DEV_NUM
*/
static void partition_mode_vpci_deinit(const struct acrn_vm *vm)
{
struct pci_vdev *vdev;
uint32_t i;
for (i = 0U; i < vm->vpci.pci_vdev_cnt; i++) {
vdev = (struct pci_vdev *) &(vm->vpci.pci_vdevs[i]);
if ((vdev->ops != NULL) && (vdev->ops->deinit != NULL)) {
if (vdev->ops->deinit(vdev) != 0) {
pr_err("vdev->ops->deinit failed!");
}
}
/* TODO: implement the deinit of 'vdev->ops' */
}
}
Question_6: Is error checking required for ``vdev->ops`` and ``vdev->ops->init``?
Yes. Because vdev->ops and vdev->ops->init cannot be guaranteed to be
not NULL. If the VM called partition_mode_vpci_deinit twice, it may be
NULL.
Module Level Configuration Design Guidelines¶
Design Goals¶
There are two goals for module level configuration design, as shown below:
In order to make the hypervisor more flexible, one source code and binary is preferred for different platforms with different configurations;
If one module is not used by a specific project, the module source code is treated as dead code. The effort to configure it in/out shall be minimized.
Hypervisor Operation Modes¶
The hypervisor operation modes are shown in Table 8 below.
Operation Modes |
Sub-modes |
Description |
|---|---|---|
INIT mode |
DETECT mode |
The hypervisor detects firmware, detects hardware resource, and reads configuration data. |
STARTUP mode |
The hypervisor initializes hardware resources, creates virtual resources like VCPU and VM, and executes VMLAUNCH instruction(the very first VM entry). |
|
OPERATIONAL mode |
N/A |
After the first VM entry, the hypervisor runs in VMX root mode and guest OS runs in VMX non-root mode. |
TERMINATION mode |
N/A |
If any fatal error is detected, the hypervisor will enter TERMINATION mode. In this mode, a default fatal error handler will be invoked to handle the fatal error. |
Configurable Module Properties¶
The properties of configurable modules are shown below:
The functionality of the module depends on platform configurations;
Corresponding platform configurations can be detected in DETECT mode;
The module APIs shall be configured in DETECT mode;
The module APIs shall be used in modes other than DETECT mode.
Platform configurations include:
Features depending on hardware or firmware
Configuration data provided by firmware
Configuration data provided by BSP
Design Rules¶
The module level configuration design rules are shown below:
The platform configurations shall be detectable by the hypervisor in DETECT mode;
Configurable module APIs shall be abstracted as operations that are implemented through a set of function pointers in the operations data structure;
Every function pointer in the operations data structure shall be instantiated as one module API in DETECT mode and the API is allowed to be implemented as empty function for some specific configurations;
The operations data structure shall be read-only in STARTUP mode, OPERATIONAL mode, and TERMINATION mode;
The configurable module shall only be accessed via APIs in the operations data structure in STARTUP mode or OPERATIONAL mode;
In order to guarantee that the function pointer in the operations data structure is dereferenced after it has been instantiated, the pre-condition shall be added for the function that dereferences the function pointer, instead of checking the pointer for NULL.
Note
The third rule shall be double checked during code review.
Use Cases¶
The following table shows some use cases of module level configuration design:
Platform Configuration |
Configurable Module |
Prerequisite |
|---|---|---|
Features depending on hardware or firmware |
This module is used to virtualize part of LAPIC functionalities. It can be done via APICv or software emulation depending on CPU capabilities. For example, Kaby Lake NUC doesn’t support virtual-interrupt delivery, while other platforms support it. |
If a function pointer is used, the prerequisite is “hv_operation_mode == OPERATIONAL”. |
Configuration data provided by firmware |
This module is used to interact with firmware (UEFI or SBL), and the configuration data is provided by firmware. |
If a function pointer is used, the prerequisite is “hv_operation_mode != DETECT”. |
Configuration data provided by BSP |
This module is used to virtualize LAPIC, and the configuration data is provided by BSP. For example, some VMs use LAPIC passthrough and the other VMs use vLAPIC. |
If a function pointer is used, the prerequisite is “hv_operation_mode == OPERATIONAL”. |
Note
Prerequisite is used to guarantee that the function pointer used for configuration is dereferenced after it has been instantiated.