Hypervisor Console, Hypervisor Shell, and Virtual UART¶
Hypervisor Console¶
The hypervisor console is a text-based terminal accessible from UART. Figure 158 shows the workflow of the console:
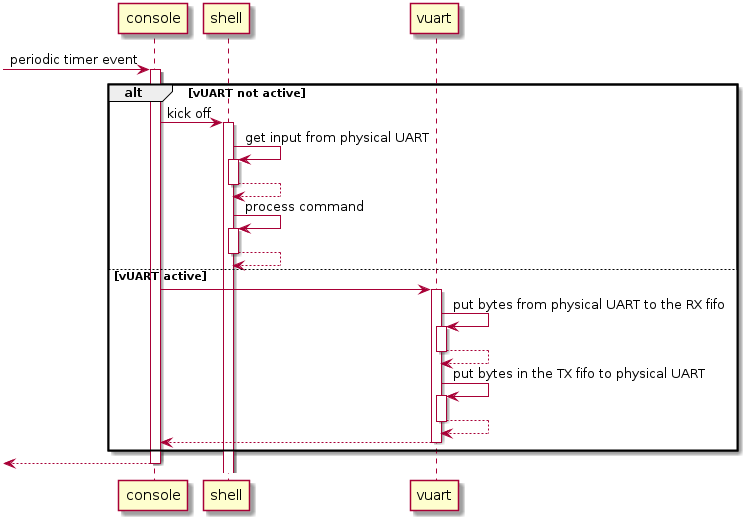
Figure 158 Periodic Console Processing¶
A periodic timer is set on initialization to trigger console processing every 40ms. Processing behavior depends on whether the vUART is active:
If it is not active, the hypervisor shell is kicked to handle inputs from the physical UART, if there are any.
If the vUART is active, the bytes from the physical UART are redirected to the RX fifo of the vUART, and those in the vUART TX fifo to the physical UART.
Note
The console is only available in the debug version of the hypervisor, configured at compile time. In the release version, the console is disabled and the physical UART is not used by the hypervisor or Service VM.
Hypervisor Shell¶
For debugging, the hypervisor shell provides commands to list some internal states and statistics of the hypervisor. It is accessible on the physical UART only when the vUART is deactivated. See ACRN Shell Commands for the list of available hypervisor shell commands.
Virtual UART¶
UART 16550 is owned by the hypervisor itself and used for debugging purposes. Properties are configured by hypervisor command line. Hypervisor emulates a UART device with 0x3F8 address to Service VM that acts as the console of Service VM with these features:
The vUART is exposed via I/O port 0x3f8.
Incorporate a 256-byte RX buffer and 65536 TX buffer.
Full emulation of input/output bytes and related interrupts.
For other read-write registers the value is stored without effects and reads get the latest stored value. For read-only registers writes are ignored.
vUART activation via shell command and deactivate via hotkey.
The following diagram shows the activation state transition of vUART.
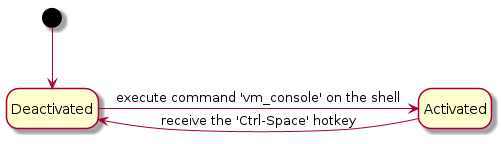
Figure 159 Periodic Console Processing¶
Specifically:
After initialization vUART is disabled.
The vUART is activated after the command “vm_console” is executed on the hypervisor shell. Inputs to the physical UART will be redirected to the vUART starting from the next timer event.
The vUART enters escaping mode after a BREAK character is received from the physical UART. When in escaping mode, next received character will be a command. After processing this command, the vUART exits the escaping mode. So far, following escaping commands are supported:
BREAK charater. If user sends break charater again in escaping mode, one break charater will be sent to vUART.
Character “e”. This will deactive vUART. Inputs to the physical UART will be handled by the hypervisor shell starting from the next timer event.
Other characters are not supported. The physical UART will prompt out an “Unknown escaping key” message and the active vUART exits escaping mode.
Note that the BREAK character is a control character and different serial terminals have different ways to send it, for example, <Ctrl-A> + F in minicom, <Ctrl-a> + <Ctrl-> in picocom, right click -> special command -> break in putty serial terminal.
The workflows are described as follows:
RX flow:
Characters are read from UART HW into a sbuf whose size is 2048 bytes, triggered by console_read
Characters are read from this sbuf and put to rxFIFO, triggered by vuart_console_rx_chars
A virtual interrupt is sent to Service VM, triggered by a read from Service VM. Characters in rxFIFO are sent to Service VM by emulation of read of register UART16550_RBR
TX flow:
Characters are put to txFIFO by emulation of write of register UART16550_THR
Characters in txFIFO are read out one by one and sent to console by printf, triggered by vuart_console_tx_chars
Implementation of printf is based on console, which finally sends characters to UART HW by writing to register UART16550_RBR