Getting Started Guide for ACRN Industry Scenario¶
Verified version¶
- Clear Linux version: 32030
- ACRN-hypervisor tag: v1.5 (acrn-2020w01.1-140000p)
- ACRN-Kernel (Service VM kernel): 4.19.78-98.iot-lts2018-sos
Prerequisites¶
The example below is based on the Intel Kaby Lake NUC platform with two disks, a SATA disk for the Clear Linux-based Service VM and an NVMe disk for the RTVM.
- Intel Kaby Lake (aka KBL) NUC platform with two disks inside (refer to the tables for detailed information).
- If you need to enable the serial port on the KBL NUC, navigate to the troubleshooting section that discusses how to prepare the cable.
- Follow the steps below to install Clear Linux OS (ver: 31670) onto the SATA disk of the KBL NUC. In our example, we install Clear Linux with version 31670; the subsequent ACRN quick setup script will upgrade Clear Linux to version 32030:
Create a bootable USB drive on Linux*:
Download the Clear Linux OS Server image.
Plug in the USB drive.
Use the
lsblkcommand line to identify the USB drive:$ lsblk | grep sd* sda 8:0 0 931.5G 0 disk ├─sda1 8:1 0 512M 0 part /boot/efi ├─sda2 8:2 0 930.1G 0 part / └─sda3 8:3 0 977M 0 part [SWAP] sdc 8:32 1 57.3G 0 disk └─sdc1 8:33 1 57.3G 0 partUnmount all the
/dev/sdcpartitions and burn the image onto the USB drive:$ umount /dev/sdc* 2>/dev/null $ sudo dd if=./clear-31670-live-server.iso of=/dev/sdc oflag=sync status=progress bs=4MPlug in the USB drive to the KBL NUC and boot from USB.
Launch the Clear Linux OS installer boot menu.
With Clear Linux OS highlighted, select Enter.
Log in with your root account and new password.
Run the installer using the following command:
# clr-installerFrom the Main menu, select Configure Installation Media and set Destructive Installation to your desired hard disk.
Select Telemetry to set Tab to highlight your choice.
Press A to show the Advanced options.
Select Select additional bundles and add bundles for network-basic, and user-basic.
Select Automatic OS Updates and choose No [Disable].
Select Manage User and choose Add New User.
Select Install.
Select Confirm Install in the Confirm Installation window to start the installation.
Note
Refer to these step-by-step instructions from the Clear Linux OS installation guide.
Hardware Setup¶
| Platform (Intel x86) | Product/kit name | Hardware | Descriptions |
|---|---|---|---|
| Kaby Lake | NUC7i7DNH | Processor |
|
| Graphics |
|
||
| System memory |
|
||
| Storage capabilities |
|
| [1] | The maximum supported memory size for ACRN is 16GB. If you are using 32GB memory, follow the How do I configure ACRN’s memory size? instructions to make a customized ACRN hypervisor that can support 32GB memory. For more detailed information about how to build ACRN from the source code, refer to this guide. |
Set up the ACRN Hypervisor for industry scenario¶
The ACRN industry scenario environment can be set up in several ways. The two listed below are recommended:
Use the pre-installed industry ACRN hypervisor¶
Note
Skip this section if you choose Using the ACRN industry out-of-the-box image.
Boot Clear Linux from SATA disk.
Login as root and download ACRN quick setup script:
# wget https://raw.githubusercontent.com/projectacrn/acrn-hypervisor/master/doc/getting-started/acrn_quick_setup.sh # chmod +x acrn_quick_setup.sh
Run the script to set up Service VM:
# ./acrn_quick_setup.sh -s 32030 -d -i
Note
-ioption means the industry scenario efi image will be used, e.g.acrn.nuc7i7dnb.industry.efi. For the detailed usage of theacrn_quick_setup.shscript, refer to the quick setup ACRN guide or simply type./acrn_quick_setup.sh -h.Use
efibootmgr -vcommand to check the ACRN boot order:BootCurrent: 000C Timeout: 1 seconds BootOrder: 0001,0002,000C,000D,0008,000E,000B,0003,0000,0004,0007 Boot0000* Windows Boot Manager VenHw(99e275e7-75a0-4b37-a2e6-c5385e6c00cb)WINDOWS.........x...B.C.D.O.B.J.E.C.T.=.{.9.d.e.a.8.6.2.c.-.5.c.d.d.-.4.e.7.0.-.a.c.c.1.-.f.3.2.b.3.4.4.d.4.7.9.5.}...o................ Boot0001* ACRN HD(1,GPT,c6715698-0f6e-4e27-bb1b-bf7779c1486d,0x800,0x47000)/File(\EFI\acrn\acrn.efi)u.a.r.t.=.d.i.s.a.b.l.e.d. Boot0002* Linux bootloader HD(3,GPT,b537f16f-d70f-4f1b-83b4-0f11be83cd83,0xc1800,0xded3000)/File(\EFI\org.clearlinux\bootloaderx64.efi) Boot0003* CentOS VenHw(99e275e7-75a0-4b37-a2e6-c5385e6c00cb) Boot0004* CentOS Linux VenHw(99e275e7-75a0-4b37-a2e6-c5385e6c00cb) Boot0007* Linux bootloader VenHw(99e275e7-75a0-4b37-a2e6-c5385e6c00cb) Boot0008* UEFI : Built-in EFI Shell VenMedia(5023b95c-db26-429b-a648-bd47664c8012)..BO Boot000B* LAN : IBA CL Slot 00FE v0110 BBS(Network,,0x0)..BO Boot000C* SATA : PORT 0 : KINGSTON SUV500120G : PART 0 : Boot Drive BBS(HD,,0x0)..BO Boot000D* INTEL SSDPEKKW256G8 : PART 0 : Boot Drive BBS(HD,,0x0)..BO Boot000E* UEFI : INTEL SSDPEKKW256G8 : PART 0 : OS Bootloader PciRoot(0x0)/Pci(0x1d,0x0)/Pci(0x0,0x0)/NVMe(0x1,00-00-00-00-00-00-00-00)/HD(1,GPT,8aa992f8-8149-4f6b-8b64-503998c776c1,0x800,0x47000)..BO
Note
Ensure that ACRN is first in the boot order, or you may use
efibootmgr -o 1command to move it to the first position. If you need to enable the serial port, run the following command before rebooting:efibootmgr -c -l '\EFI\acrn\acrn.efi' -d /dev/sda -p 1 -L ACRN -u "uart=port@0x3f8"Reboot KBL NUC.
Use the
dmesgcommand to ensure that the Service VM boots:# dmesg | grep ACRN [ 0.000000] Hypervisor detected: ACRN [ 1.252840] ACRNTrace: Initialized acrn trace module with 4 cpu [ 1.253291] ACRN HVLog: Failed to init last hvlog devs, errno -19 [ 1.253292] ACRN HVLog: Initialized hvlog module with 4
Use the ACRN industry out-of-the-box image¶
Note
If you are following the section above to set up the Service VM, jump to the next section.
Boot Clear Linux from NVMe disk.
Download the Service VM industry image:
# wget https://github.com/projectacrn/acrn-hypervisor/releases/download/acrn-2020w01.1-140000p/sos-industry-32030.img.xzDecompress the .xz image:
# xz -d sos-industry-32030.img.xzBurn the Service VM image onto the SATA disk:
# dd if=sos-industry-32030.img of=/dev/sda bs=4M oflag=sync status=progress iflag=fullblock seek=0 conv=notruncConfigure the EFI firmware to boot the ACRN hypervisor by default:
# efibootmgr -c -l "\EFI\acrn\acrn.efi" -d /dev/sda -p 1 -L "ACRN" -u "uart=disabled"Or use the following command to enable the serial port:
# efibootmgr -c -l "\EFI\acrn\acrn.efi" -d /dev/sda -p 1 -L "ACRN" -u "uart=port@0x3f8"Reboot the test machine. After the Clear Linux OS boots, log in as “root” for the first time.
Install and launch the Preempt-RT VM¶
Log in to the Service VM with root privileges.
Download the Preempt-RT VM image:
# wget https://github.com/projectacrn/acrn-hypervisor/releases/download/acrn-2020w01.1-140000p/preempt-rt-32030.img.xzDecompress the xz image:
# xz -d preempt-rt-32030.img.xzBurn the Preempt-RT VM image onto the NVMe disk:
# dd if=preempt-rt-32030.img of=/dev/nvme0n1 bs=4M oflag=sync status=progress iflag=fullblock seek=0 conv=notruncUse the
lspcicommand to ensure that the correct NVMe device IDs will be used for the passthru before launching the script:# lspci -v | grep -iE 'nvm|ssd' 02:00.0 Non-Volatile memory controller: Intel Corporation Device f1a6 (rev 03) (prog-if 02 [NVM Express]) # lspci -nn | grep "Non-Volatile memory controller" 02:00.0 Non-Volatile memory controller [0108]: Intel Corporation Device [8086:f1a6] (rev 03)Modify the script to use the correct NVMe device IDs and bus number.
# vim /usr/share/acrn/samples/nuc/launch_hard_rt_vm.sh passthru_vpid=( ["eth"]="8086 156f" ["sata"]="8086 9d03" ["nvme"]="8086 f1a6" ) passthru_bdf=( ["eth"]="0000:00:1f.6" ["sata"]="0000:00:17.0" ["nvme"]="0000:02:00.0" )
/usr/bin/acrn-dm -A -m $mem_size -s 0:0,hostbridge \ --lapic_pt \ --rtvm \ --virtio_poll 1000000 \ -U 495ae2e5-2603-4d64-af76-d4bc5a8ec0e5 \ -s 2,passthru,02/00/0 \ -s 3,virtio-console,@stdio:stdio_port \ -s 8,virtio-net,tap0 \ $pm_channel $pm_by_vuart \ --ovmf /usr/share/acrn/bios/OVMF.fd \ hard_rtvm }Upon deployment completion, launch the RTVM directly onto your KBL NUC:
# /usr/share/acrn/samples/nuc/launch_hard_rt_vm.sh
RT Performance Test¶
Cyclictest introduction¶
The cyclictest is most commonly used for benchmarking RT systems. It is one of the most frequently used tools for evaluating the relative performance of real-time systems. Cyclictest accurately and repeatedly measures the difference between a thread’s intended wake-up time and the time at which it actually wakes up in order to provide statistics about the system’s latencies. It can measure latencies in real-time systems that are caused by hardware, firmware, and the operating system. The cyclictest is currently maintained by Linux Foundation and is part of the test suite rt-tests.
Pre-Configurations¶
Firmware update on the NUC¶
If you need to update to the latest UEFI firmware for the NUC hardware. Follow these BIOS Update Instructions for downloading and flashing an updated BIOS for the NUC.
Recommended BIOS settings¶
| Hyper-Threading | Intel Advanced Menu -> CPU Configuration | Disabled |
| Intel VMX | Intel Advanced Menu -> CPU Configuration | Enable |
| Speed Step | Intel Advanced Menu -> Power & Performance -> CPU - Power Management Control | Disabled |
| Speed Shift | Intel Advanced Menu -> Power & Performance -> CPU - Power Management Control | Disabled |
| C States | Intel Advanced Menu -> Power & Performance -> CPU - Power Management Control | Disabled |
| RC6 | Intel Advanced Menu -> Power & Performance -> GT - Power Management | Disabled |
| GT freq | Intel Advanced Menu -> Power & Performance -> GT - Power Management | Lowest |
| SA GV | Intel Advanced Menu -> Memory Configuration | Fixed High |
| VT-d | Intel Advanced Menu -> System Agent Configuration | Enable |
| Gfx Low Power Mode | Intel Advanced Menu -> System Agent Configuration -> Graphics Configuration | Disabled |
| DMI spine clock gating | Intel Advanced Menu -> System Agent Configuration -> DMI/OPI Configuration | Disabled |
| PCH Cross Throttling | Intel Advanced Menu -> PCH-IO Configuration | Disabled |
| Legacy IO Low Latency | Intel Advanced Menu -> PCH-IO Configuration -> PCI Express Configuration | Enabled |
| PCI Express Clock Gating | Intel Advanced Menu -> PCH-IO Configuration -> PCI Express Configuration | Disabled |
| Delay Enable DMI ASPM | Intel Advanced Menu -> PCH-IO Configuration -> PCI Express Configuration | Disabled |
| DMI Link ASPM | Intel Advanced Menu -> PCH-IO Configuration -> PCI Express Configuration | Disabled |
| Aggressive LPM Support | Intel Advanced Menu -> PCH-IO Configuration -> SATA And RST Configuration | Disabled |
| USB Periodic Smi | Intel Advanced Menu -> LEGACY USB Configuration | Disabled |
| ACPI S3 Support | Intel Advanced Menu -> ACPI Settings | Disabled |
| Native ASPM | Intel Advanced Menu -> ACPI Settings | Disabled |
Note
BIOS settings depend on the platform and BIOS version; some may not be applicable.
Configure CAT¶
Note
CAT configuration is only supported on the Apollo Lake NUC.
With the ACRN Hypervisor shell, we can use cpuid and wrmsr/rdmsr debug commands to enumerate the CAT capability and set the CAT configuration without rebuilding binaries. Because lapic is a pass-through to the RTVM, the CAT configuration must be set before launching the RTVM.
Check CAT ability with cupid¶
First run cpuid 0x10 0x0. The return value of ebx[bit 2] reports that the L2 CAT is supported.
Next, run cpuid 0x10 0x2 to query the L2 CAT capability; the return value of eax[bit 4:0]
reports that the cache mask has 8 bits, and edx[bit 15:0] reports that 04 CLOS are supported,
as shown below. The reported data is in the format of [ eax:ebx:ecx:edx ]:
ACRN:\>cpuid 0x10 0x0
cpuid leaf: 0x10, subleaf: 0x0, 0x0:0x4:0x0:0x0
ACRN:\>cpuid 0x10 0x2
cpuid leaf: 0x10, subleaf: 0x2, 0x7:0x0:0x0:0x3
Set CLOS (QOS MASK) and PQR_ASSOC MSRs to configure the CAT¶
Apollo Lake doesn’t have L3 cache and it supports L2 CAT. The CLOS MSRs are per L2 cache and starts from 0x00000D10. In the case of 4 CLOS MSRs, the address is as follows:
MSR_IA32_L2_QOS_MASK_0 0x00000D10
MSR_IA32_L2_QOS_MASK_1 0x00000D11
MSR_IA32_L2_QOS_MASK_2 0x00000D12
MSR_IA32_L2_QOS_MASK_3 0x00000D13
The PQR_ASSOC MSR is per CPU core; each core has its own PQR_ASSOC:
MSR_IA32_PQR_ASSOC 0x00000C8F
To set the CAT, first set the CLOS MSRs. Next, set the PQR_ASSOC of each CPU so that the CPU of the RTVM uses dedicated cache and other CPUs use other cache. Taking a Quad Core Apollo Lake platform for example, CPU0 and CPU1 share L2 cache while CPU2 and CPU3 share the other L2 cache.
- If we allocate CPU2 and CPU3, no extra action is required.
- If we allocate only CPU1 to the RTVM, we need to set the CAT as follows. These commands actually set the CAT configuration for L2 cache shared by CPU0 and CPU1.
Set CLOS with
wrmsr <reg_num> <value>, we want VM1 to use the lower 6 ways of cache, so CLOS0 is set to 0xf0 for the upper 4 ways, and CLOS1 is set to 0x0f for the lower 4 ways:ACRN:\>wrmsr -p1 0xd10 0xf0 ACRN:\>wrmsr -p1 0xd11 0x0f
Attach COS1 to PCPU1. Because MSR is IA32_PQR_ASSOC [bit 63:32], we’ll write 0x100000000 to it to use CLOS1:
ACRN:\>wrmsr -p0 0xc8f 0x000000000 ACRN:\>wrmsr -p1 0xc8f 0x100000000
In addition to setting the CAT configuration via HV commands, we allow developers to add the CAT configurations to the VM config and do the configure automatically at the time of RTVM creation. Refer to Configure CAT for VM with VM Configuration for details.
Set up the core allocation for the RTVM¶
In our recommended configuration, two cores are allocated to the RTVM: core 0 for housekeeping and core 1 for RT tasks. In order to achieve this, follow the below steps to allocate all housekeeping tasks to core 0:
Launch RTVM:
# /usr/share/acrn/samples/nuc/launch_hard_rt_vm.shLog in to RTVM as root and run the script as below:
#!/bin/bash # Copyright (C) 2019 Intel Corporation. # SPDX-License-Identifier: BSD-3-Clause # Move all IRQs to core 0. for i in `cat /proc/interrupts | grep '^ *[0-9]*[0-9]:' | awk {'print $1'} | sed 's/:$//' `; do echo setting $i to affine for core zero echo 1 > /proc/irq/$i/smp_affinity done # Move all rcu tasks to core 0. for i in `pgrep rcu`; do taskset -pc 0 $i; done # Change realtime attribute of all rcu tasks to SCHED_OTHER and priority 0 for i in `pgrep rcu`; do chrt -v -o -p 0 $i; done # Change realtime attribute of all tasks on core 1 to SCHED_OTHER and priority 0 for i in `pgrep /1`; do chrt -v -o -p 0 $i; done # Change realtime attribute of all tasks to SCHED_OTHER and priority 0 for i in `ps -A -o pid`; do chrt -v -o -p 0 $i; done echo disabling timer migration echo 0 > /proc/sys/kernel/timer_migration
Note
You can ignore the error messages during the script running.
Run cyclictest¶
Refer to the troubleshooting section below that discusses how to enable the network connection for RTVM.
Launch RTVM and log in as root.
Install the
cyclictesttool:# swupd bundle-add dev-utilsUse the following command to start cyclictest:
# cyclictest -a 1 -p 80 -m -N -D 1h -q -H 30000 --histfile=test.logParameter descriptions:
-a 1: to bind the RT task to core 1 -p 80: to set the priority of the highest prio thread -m: lock current and future memory allocations -N: print results in ns instead of us (default us) -D 1h: to run for 1 hour, you can change it to other values -q: quiee mode; print a summary only on exit -H 30000 –histfile=test.log: dump the latency histogram to a local file
Troubleshooting¶
Use serial port on KBL NUC¶
You can enable the serial console on the KBL NUC (NUC7i7DNH). The KBL NUC has a serial port header you can expose with a serial DB9 header cable. You can build this cable yourself; refer to the KBL NUC product specification as shown below:
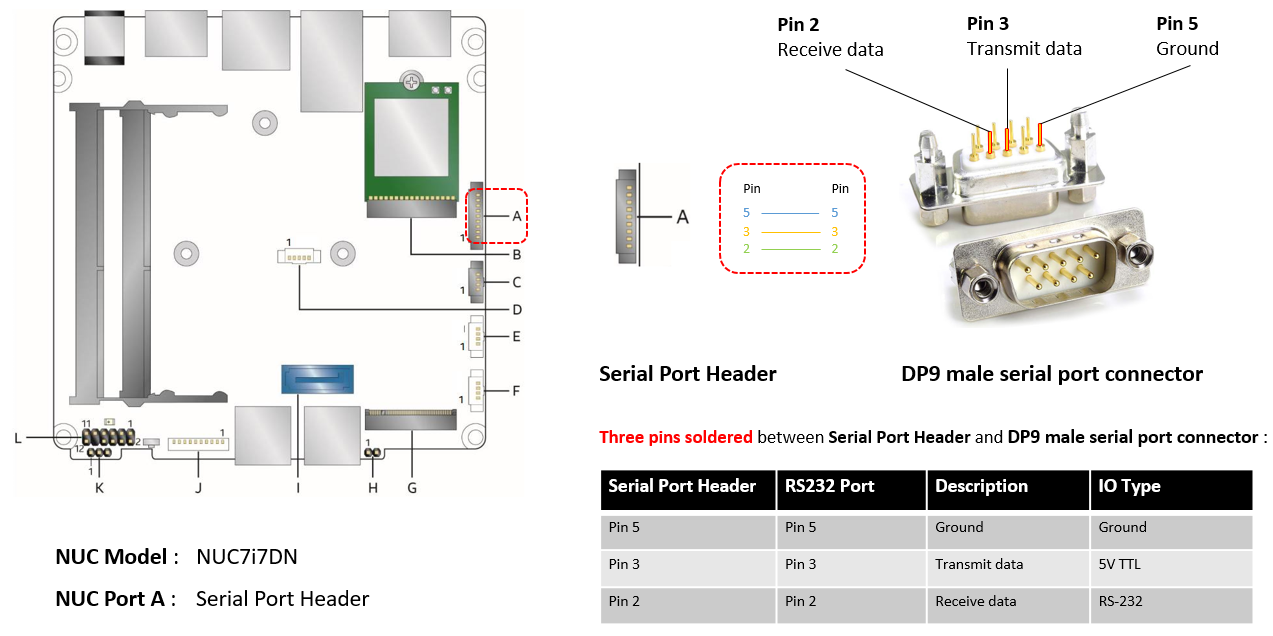
Figure 21 KBL serial port header details

Figure 22 KBL serial port header to RS232 cable
Or you can purchase such a cable.
You’ll also need an RS232 DB9 female to USB cable, or an RS232 DB9 female/female (NULL modem) cross-over cable to connect to your host system.
Note that If you want to use the RS232 DB9 female/female cable, choose the cross-over
type rather than straight-through type.
EFI image doesn’t exist¶
You might see the error message if you are running the acrn_quick_setup.sh script
on an older Clear Linux OS ( < 31470 ):
/usr/lib/acrn/acrn.nuc7i7dnb.industry.efi doesn't exist.
Use one of these efi images from /usr/lib/acrn.
------
/usr/lib/acrn/acrn.kbl-nuc-i7.industry.efi
------
Copy the efi image to /usr/lib/acrn/acrn.nuc7i7dnb.industry.efi, then run the script again.
To fix it, just rename the existing efi image to /usr/lib/acrn/acrn.nuc7i7dnb.industry.efi and
then run the script again:
# cp -r /usr/lib/acrn/acrn.kbl-nuc-i7.industry.efi /usr/lib/acrn/acrn.nuc7i7dnb.industry.efi
# ./acrn_quick_setup.sh -s <target version> -i -d
Enabling the network on RTVM¶
If you need to access the internet, you must add the following command line to the
launch_hard_rt_vm.sh script before launch it:
/usr/bin/acrn-dm -A -m $mem_size -s 0:0,hostbridge \
--lapic_pt \
--rtvm \
--virtio_poll 1000000 \
-U 495ae2e5-2603-4d64-af76-d4bc5a8ec0e5 \
-s 2,passthru,02/0/0 \
-s 3,virtio-console,@stdio:stdio_port \
-s 8,virtio-net,tap0 \
$pm_channel $pm_by_vuart \
--ovmf /usr/share/acrn/bios/OVMF.fd \
hard_rtvm
}