ACRN Kernel Parameters¶
Generic kernel parameters¶
A number of kernel parameters control the behavior of ACRN-based systems. Some are applicable to the Service OS (SOS) kernel, others to the User OS (UOS) kernel, and some are applicable to both.
This section focuses on generic parameters from the Linux kernel which are relevant for configuring or debugging ACRN-based systems.
| Parameter | Used in SOS or UOS | Description | Usage example | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| module_blacklist | SOS | A comma-separated list of modules that should not be loaded. Useful to debug or work around issues related to specific modules. | module_blacklist=dwc3_pci
|
||||||||||||||||||
| no_timer_check | SOS,UOS | Disables the code which tests for broken timer IRQ sources. | no_timer_check
|
||||||||||||||||||
| console | SOS,UOS | Output console device and options.
|
console=tty0
console=ttyS0
console=hvc0
|
||||||||||||||||||
| loglevel | SOS | All Kernel messages with a loglevel less than the console loglevel will
be printed to the console. The loglevel can also be changed with
|
loglevel=7
|
||||||||||||||||||
| ignore_loglevel | UOS | Ignoring loglevel setting will print all
kernel messages to the console. Useful for debugging.
We also add it as printk module parameter, so users
could change it dynamically, usually by changing
/sys/module/printk/parameters/ignore_loglevel. |
ignore_loglevel
|
||||||||||||||||||
| log_buf_len | UOS | Sets the size of the printk ring buffer, in bytes. n must be a power of two and greater than the minimal size. The minimal size is defined by LOG_BUF_SHIFT kernel config parameter. There is also CONFIG_LOG_CPU_MAX_BUF_SHIFT config parameter that allows to increase the default size depending on the number of CPUs. See init/Kconfig for more details.” | log_buf_len=16M
|
||||||||||||||||||
| consoleblank | SOS,UOS | The console blank (screen saver) timeout in seconds. Defaults to 600 (10 minutes). A value of 0 disables the blank timer. | consoleblank=0
|
||||||||||||||||||
| rootwait | SOS,UOS | Wait (indefinitely) for root device to show up. Useful for devices that are detected asynchronously (e.g. USB and MMC devices). | rootwait
|
||||||||||||||||||
| root | SOS,UOS | Define the root filesystem
|
root=/dev/mmcblk0p1
root=/dev/vda2
root=PARTUUID=00112233-4455-6677-8899-AABBCCDDEEFF
|
||||||||||||||||||
| rw | SOS,UOS | Mount root device read-write on boot | rw
|
||||||||||||||||||
| tsc | UOS | Disable clocksource stability checks for TSC. Format: <string>, where the only supported value is:
|
tsc=reliable
|
||||||||||||||||||
| cma | SOS | Sets the size of the kernel global memory area for
contiguous memory allocations, and optionally the
placement constraint by the physical address range of
memory allocations. A value of 0 disables CMA
altogether. For more information, see
include/linux/dma-contiguous. |
cma=64M@0
|
||||||||||||||||||
| hvlog | SOS | Reserve memory for the ACRN hypervisor log. The reserved space should not overlap any other blocks (e.g. hypervisor’s reserved space). | hvlog=2M@0x6de00000
|
||||||||||||||||||
| memmap | SOS | Mark specific memory as reserved.
|
memmap=0x400000$0x6da00000
|
||||||||||||||||||
| ramoops.mem_address ramoops.mem_size ramoops.console_size | SOS | Ramoops is an oops/panic logger that writes its logs to RAM before the system crashes. Ramoops uses a predefined memory area to store the dump. See Linux Kernel Ramoops oops/panic logger for details. | ramoops.mem_address=0x6da00000
ramoops.mem_size=0x400000
ramoops.console_size=0x200000
|
||||||||||||||||||
| reboot_panic | SOS | Reboot in case of panic The comma-delimited parameters are:
|
reboot_panic=p,w
|
||||||||||||||||||
| maxcpus | UOS | Maximum number of processors that an SMP kernel will bring up during bootup.
After bootup, you can bring up additional plugged CPUs by executing
|
maxcpus=1
|
||||||||||||||||||
| nohpet | UOS | Don’t use the HPET timer | nohpet
|
||||||||||||||||||
| intel_iommu | UOS | Intel IOMMU driver (DMAR) option
|
intel_iommu=off
|
Intel GVT-g (AcrnGT) Parameters¶
This table gives an overview of all the Intel GVT-g parameters that are available to tweak the behavior of the graphics sharing (Intel GVT-g, aka AcrnGT) capabilities in ACRN. The GVT-g-kernel-options section below has more details on a few select parameters.
| Parameter | Used in SOS or UOS | Description | Usage example |
|---|---|---|---|
| i915.enable_gvt | SOS | Enable Intel GVT-g graphics virtualization support in the host | i915.enable_gvt=1
|
| i915.enable_pvmmio | SOS, UOS | Control Para-Virtualized MMIO (PVMMIO). It batches sequential MMIO writes into a shared buffer between the SOS and UOS | i915.enable_pvmmio=0x1F
|
| i915.gvt_workload_priority | SOS | Define the priority level of UOS graphics workloads | i915.gvt_workload_priority=1
|
| i915.enable_initial_modeset | SOS | On MRB, value must be 1. On NUC or UP2 boards, value must be
0. See i915.enable_initial_modeset. |
i915.enable_initial_modeset=1
i915.enable_initial_modeset=0
|
| i915.nuclear_pageflip | SOS,UOS | Force enable atomic functionality on platforms that don’t have full support yet. | i915.nuclear_pageflip=1
|
| i915.avail_planes_per_pipe | SOS | See i915.avail_planes_per_pipe and i915.domain_plane_owners. | i915.avail_planes_per_pipe=0x01010F
|
| i915.domain_plane_owners | SOS | See i915.avail_planes_per_pipe and i915.domain_plane_owners. | i915.domain_plane_owners=0x011111110000
|
| i915.domain_scaler_owner | SOS | See i915.domain_scaler_owner | i915.domain_scaler_owner=0x021100
|
| i915.enable_guc | SOS | Enable GuC load for HuC load. | i915.enable_guc=0x02
|
| i915.avail_planes_per_pipe | UOS | See i915.avail_planes_per_pipe and i915.domain_plane_owners. | i915.avail_planes_per_pipe=0x070F00
|
| i915.enable_guc | UOS | Disable GuC | i915.enable_guc=0
|
| i915.enable_hangcheck | UOS | Disable check GPU activity for detecting hangs. | i915.enable_hangcheck=0
|
| i915.enable_fbc | UOS | Enable frame buffer compression for power savings | i915.enable_fbc=1
|
GVT-g (AcrnGT) Kernel Options details¶
This section provides additional information and details on the kernel command line options that are related to AcrnGT.
i915.enable_gvt¶
This option enables support for Intel GVT-g graphics virtualization
support in the host. By default, it’s not enabled, so we need to add
i915.enable_gvt=1 in the SOS kernel command line. This is a Service
OS only parameter, and cannot be enabled in the User OS.
i915.enable_pvmmio¶
We introduce the feature named Para-Virtualized MMIO (PVMMIO) to improve graphics performance of the GVT-g guest. This feature batches sequential MMIO writes into a shared buffer between the Service OS and User OS, and then submits a para-virtualized command to notify to GVT-g in Service OS. This effectively reduces the trap numbers of MMIO operations and improves overall graphics performance.
The i915.enable_pvmmio option controls
the optimization levels of the PVMMIO feature: each bit represents a
sub-feature of the optimization. By default, all
sub-features of PVMMIO are enabled. They can also be selectively
enabled or disabled..
The PVMMIO optimization levels are:
- PVMMIO_ELSP_SUBMIT = 0x1 - Batch submission of the guest graphics workloads
- PVMMIO_PLANE_UPDATE = 0x2 - Batch plane register update operations
- PVMMIO_PLANE_WM_UPDATE = 0x4 - Batch watermark registers update operations
- PVMMIO_MASTER_IRQ = 0x8 - Batch IRQ related registers
- PVMMIO_PPGTT_UPDATE = 0x10 - Use PVMMIO method to update the PPGTT table of guest.
Note
This parameter works in both the Service OS and User OS, but changes to one will affect the other. For example, if either SOS or UOS disables the PVMMIO_PPGTT_UPDATE feature, this optimization will be disabled for both.
i915.gvt_workload_priority¶
AcrnGT supports Prioritized Rendering as described in the Prioritized Rendering and Preemption high-level design. This configuration option controls the priority level of GVT-g guests. Priority levels range from -1023 to 1023.
The default priority is zero, the same priority as the Service OS. If the level is less than zero, the guest’s priority will be lower than the Service OS, so graphics preemption will work and the prioritized rendering feature will be enabled. If the level is greater than zero, UOS graphics workloads will preempt most of the SOS graphics workloads, except for display updating related workloads that use a default highest priority (1023).
Currently, all UOSes share the same priority. This is a Service OS only parameters, and does not work in the User OS.
i915.enable_initial_modeset¶
At time, kernel graphics must be initialized with a valid display configuration with full display pipeline programming in place before the user space is initialized and without a fbdev & fb console.
When i915.enable_initial_modeset=1, the FBDEV of i915 will not be
initialized, so users would not be able to see the fb console on screen.
If there is no graphics UI running by default, users will see black
screens displayed.
When i915.enable_initial_modeset=0 in SOS, the plane restriction
(also known as plane-based domain ownership) feature will be disabled.
(See the next section and Plane-Based Domain Ownership in the ACRN GVT-g
High Level Design for more information about this feature.)
In the current configuration, we will set
i915.enable_initial_modeset=1 in SOS and
i915.enable_initial_modeset=0 in UOS.
This parameter is not used on UEFI platforms.
i915.avail_planes_per_pipe and i915.domain_plane_owners¶
Both Service OS and User OS are provided a set of HW planes where they
can display their contents. Since each domain provides its content,
there is no need for any extra composition to be done through SOS.
i915.avail_planes_per_pipe and i915.domain_plane_owners work
together to provide the plane restriction (or plan-based domain
ownership) feature.
i915.domain_plane_owners
On Intel’s display hardware, each pipeline contains several planes, which are blended together by their Z-order and rendered to the display monitors. In AcrnGT, we can control each planes’ ownership so that the domains can display contents on the planes they own.
The
i915.domain_plane_ownersparameter controls the ownership of all the planes in the system, as shown in Figure 248. Each 4-bit nibble identifies the domain id owner for that plane and a group of 4 nibbles represents a pipe. This is a Service OS only configuration and cannot be modified at runtime. Domain ID 0x0 is for the Service OS, the User OS use domain IDs from 0x1 to 0xF.
Figure 248 i915.domain_plane_owners
For example, if we set
i915.domain_plane_owners=0x010001101110, the plane ownership will be as shown in Figure 249 - SOS (green) owns plane 1A, 1B, 4B, 1C, and 2C, and UOS #1 owns plane 2A, 3A, 4A, 2B, 3B and 3C.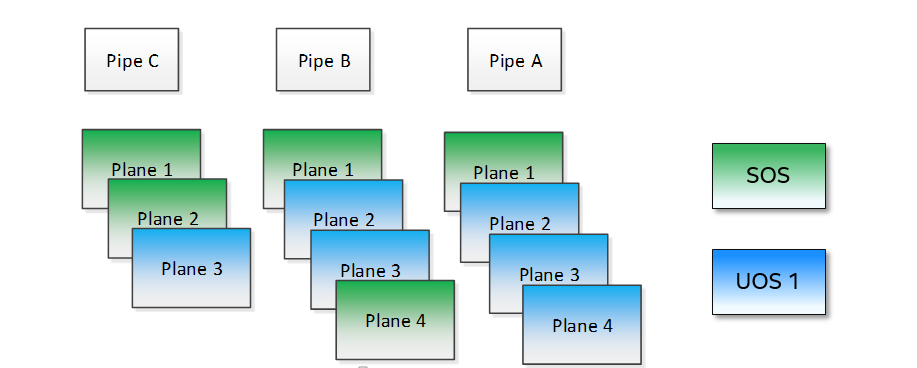
Figure 249 i915.domain_plane_owners example
Some other examples:
- i915.domain_plane_owners=0x022211110000 - SOS (0x0) owns planes on pipe A; UOS #1 (0x1) owns all planes on pipe B; and UOS #2 (0x2) owns all planes on pipe C (since, in the representation in Figure 248 above, there are only 3 planes attached to pipe C).
- i915.domain_plane_owners=0x000001110000 - SOS owns all planes on pipe A and pipe C; UOS #1 owns plane 1, 2 and 3 on pipe B. Plane 4 on pipe B is owned by the SOS so that if it wants to display notice message, it can display on top of the UOS.
i915.avail_planes_per_pipe
Option
i915.avail_planes_per_pipeis a bitmask (shown in Figure 250) that tells the i915 driver which planes are available and can be exposed to the compositor. This is a parameter that must to be set in each domain. Ifi915.avail_planes_per_pipe=0, the plane restriction feature is disabled.
Figure 250 i915.avail_planes_per_pipe
For example, if we set
i915.avail_planes_per_pipe=0x030901in SOS andi915.avail_planes_per_pipe=0x04060Ein UOS, the planes will be as shown in Figure 251 and Figure 251: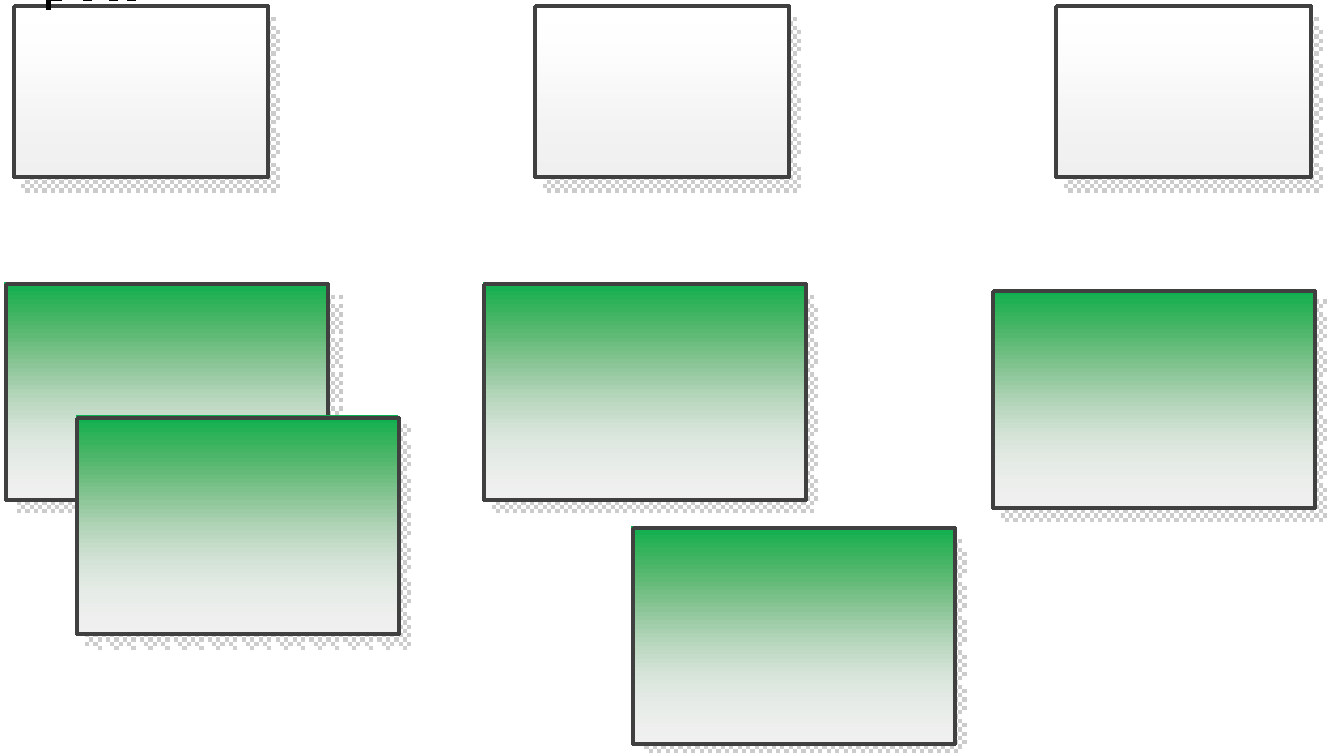
Figure 251 SOS i915.avail_planes_per_pipe
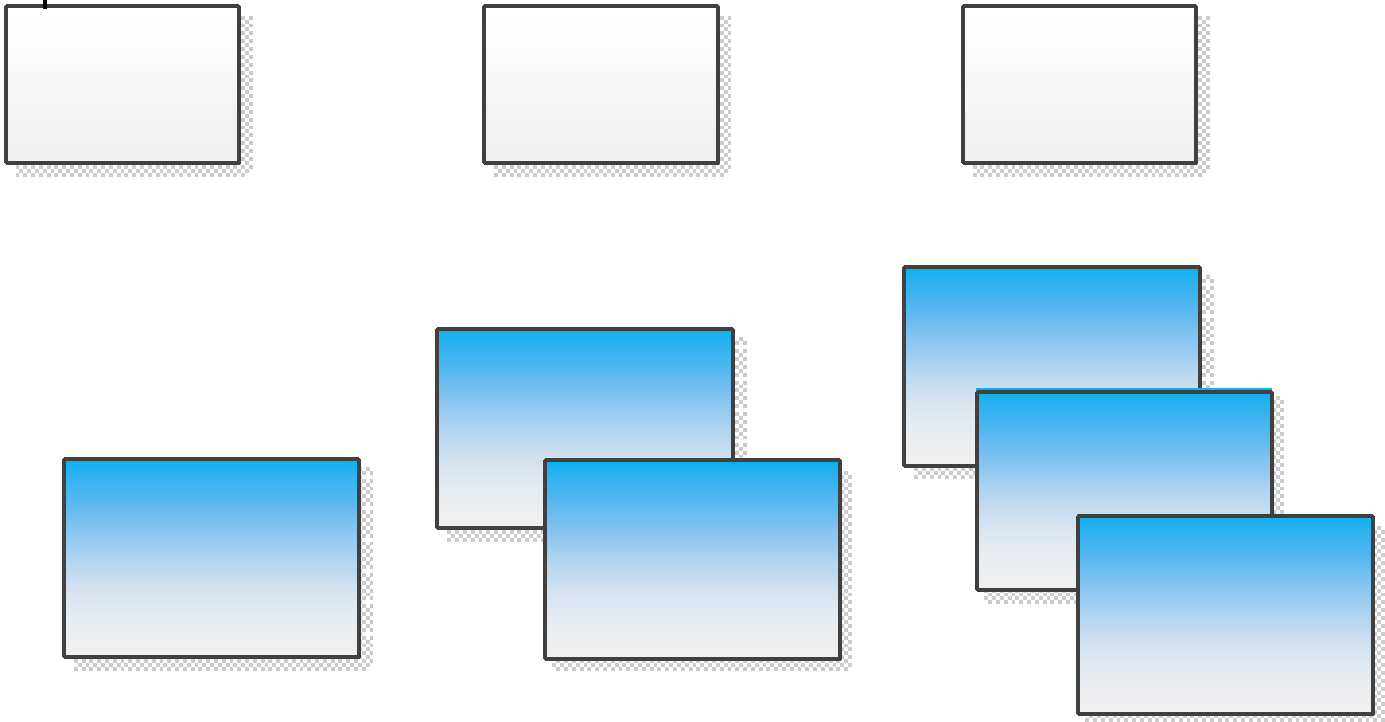
Figure 252 UOS i915.avail_planes_per_pipe
i915.avail_planes_per_pipecontrols the view of planes from i915 drivers inside of every domain, andi915.domain_plane_ownersis the global arbiter controlling which domain can present its content onto the real hardware. Generally, they are aligned. For example, we can seti915.domain_plane_owners= 0x011111110000,i915.avail_planes_per_pipe=0x00000Fin SOS, andi915.avail_planes_per_pipe=0x070F00in domain 1, so every domain will only flip on the planes they owns.However, we don’t force alignment:
avail_planes_per_pipemight not be aligned with the setting ofdomain_plane_owners. Consider this example:i915.domain_plane_owners=0x011111110000,i915.avail_planes_per_pipe=0x01010Fin SOS andi915.avail_planes_per_pipe=0x070F00in domain 1. With this configuration, SOS will be able to render on plane 1B and plane 1C, however, the content of plane 1B and plane 1C will not be flipped onto the real hardware.
i915.domain_scaler_owner¶
On each Intel GPU display pipeline, there are several plane scalers to zoom in/out the planes. For example, if a 720p video is played full-screen on a 1080p display monitor, the kernel driver will use a scaler to zoom in the video plane to a 1080p image and present it onto a display pipeline. (Refer to “Intel Open Source Graphics PRM Vol 7: display” for the details.)
On Broxton platforms, Pipe A and Pipe B each
have two plane scalers, and Pipe C has one plane scaler. To support the
plane scaling in AcrnGT guest OS, we introduced the parameter
i915.domain_scaler_owner, to assign a specific scaler to the target
guest OS.
As with the parameter i915.domain_plane_owners, each nibble of
i915.domain_scaler_owner represents the domain id that owns the scaler;
every nibble (4 bits) represents a scaler and every group of 2 nibbles
represents a pipe. This is a Service OS only configuration and cannot be
modified at runtime. Domain ID 0x0 is for the Service OS, the User OS
use domain IDs from 0x1 to 0xF.
For example, if we set i915.domain_scaler_owner=0x021100, the SOS
owns scaler 1A, 2A; UOS #1 owns scaler 1B, 2B; and UOS #2 owns scaler
1C.
i915.enable_hangcheck¶
This parameter enable detection of a GPU hang. When enabled, the i915 will start a timer to check if the workload is completed in a specific time. If not, i915 will treat it as a GPU hang and trigger a GPU reset.
In AcrnGT, the workload in SOS and UOS can be set to different
priorities. If SOS is assigned a higher priority than the UOS, the UOS’s
workload might not be able to run on the HW on time. This may lead to
the guest i915 triggering a hangcheck and lead to a guest GPU reset.
This reset is unnecessary so we use i915.enable_hangcheck=0 to
disable this timeout check and prevent guest from triggering unnecessary
GPU resets.